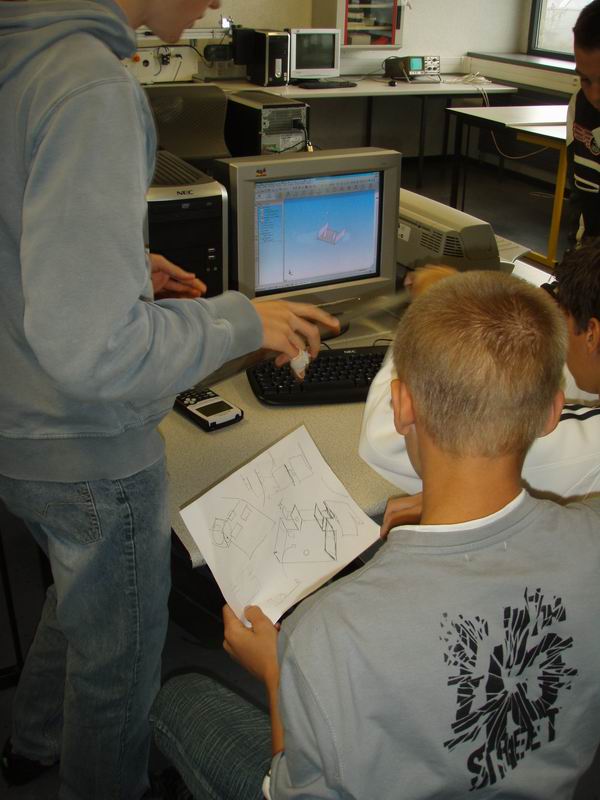
Conception du chassis sous SolidWorks et à partir de croquis
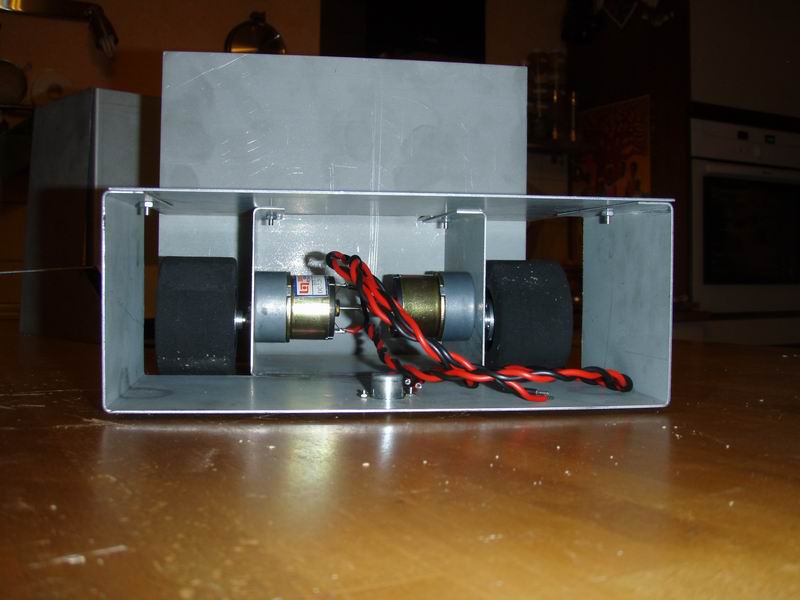
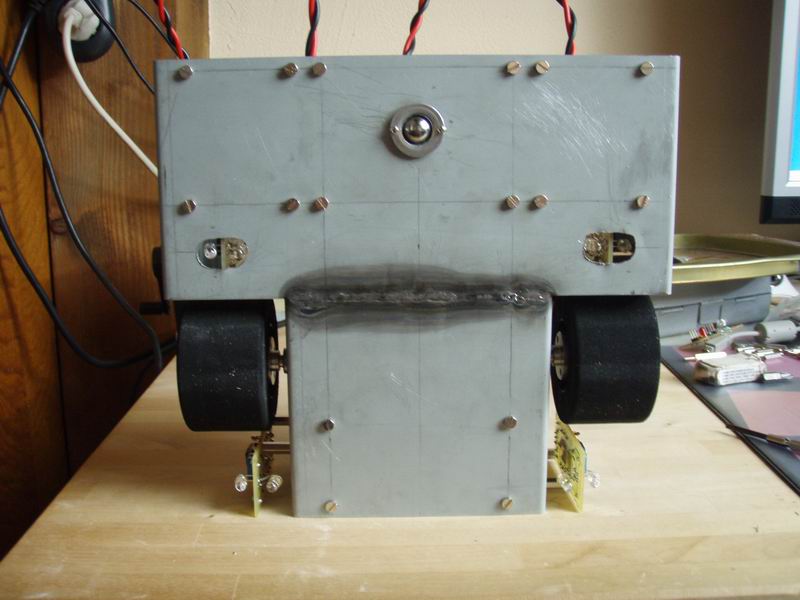
Premier montage des moteurs et de la bille sur le chassis en tôles pliées
Essai de positionnement des cartes électroniques
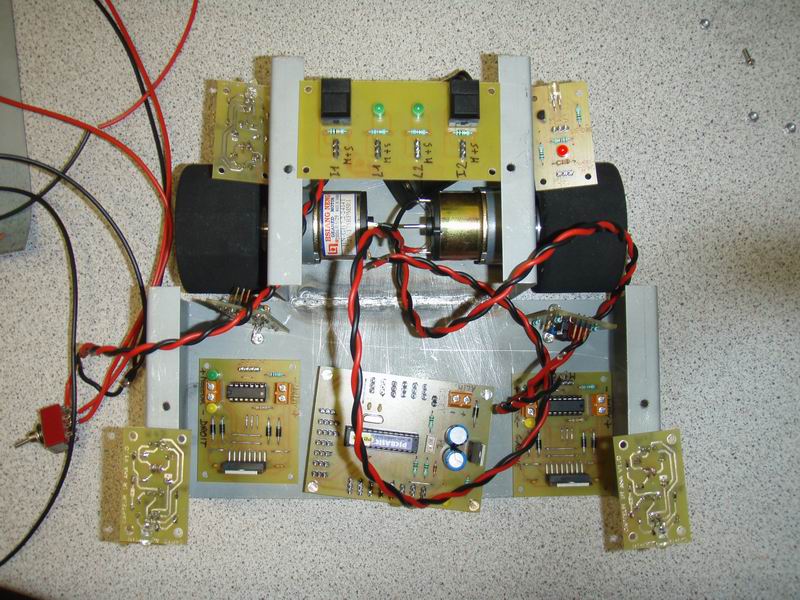
Fixation des cartes électroniques


Vue de dessous avec les capteurs TOR
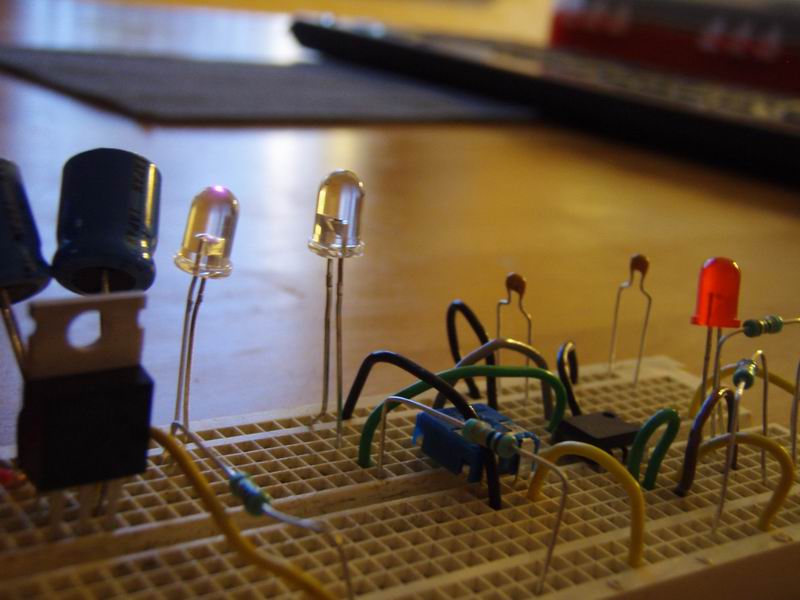
Gros plan sur le câblage des différents élements

Vue de face avec le bouclier
