Toutes les cartes électroniques du robot ont été conçues et routées sous KiCAD, logiciel gratuit de schématisation, de routage assisté et de représentation 3D.
Il existe également un tutorial à cette adresse : http://www.kicadlib.org/Fichiers/Tutorial_Kicad_FR
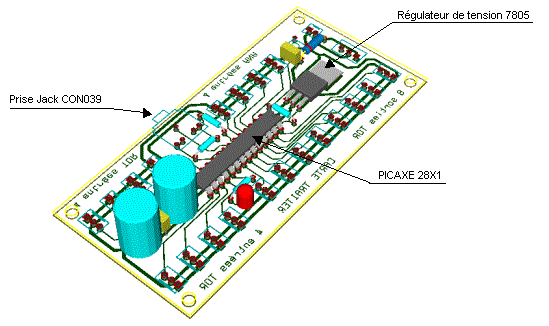
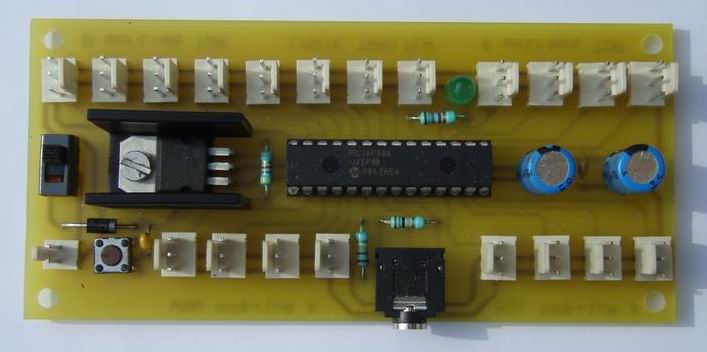
Carte traiter à base de microcontroleur PICAXE 28X1
La carte traiter du robot est le ''cerveau'' du robot. Elle est construite autour d'un PICAXE 28X1 et est programmable à l'aide d'un câble USB qui se connecte sur un port Jack de type TC38 (CON039).
On y retrouve également un régulateur de tension 5 Volts, un 7805.
Le schéma électrique : traiter-sch
Le typon : Typon traiter
Remarque : vérifier le brochage du bouton poussoir de reset et l'adapter si nécessaire.
Il existe une documentation complète en pdf sur l'interfaçage et la programmation des microcontroleurs PICAXE :
picaxe_manual1
picaxe_manual2
picaxe_manual3
La programmation du robot se fait sous forme de logigramme sous Programming éditor (licence gratuite) ou Logicator (licence payante).
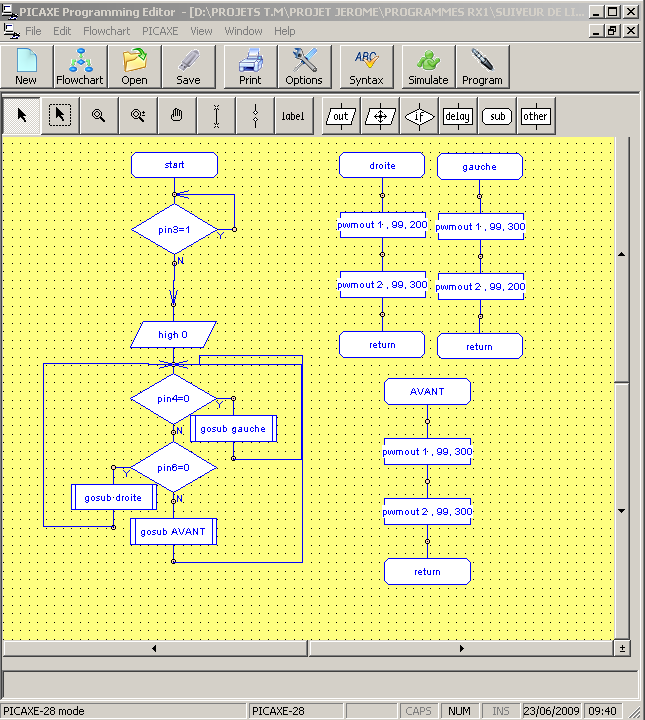

Pour faciliter la compréhension d'une telle carte, les composants ont été implantés en concordance avec la fenêtre de simulation de Programming éditor.
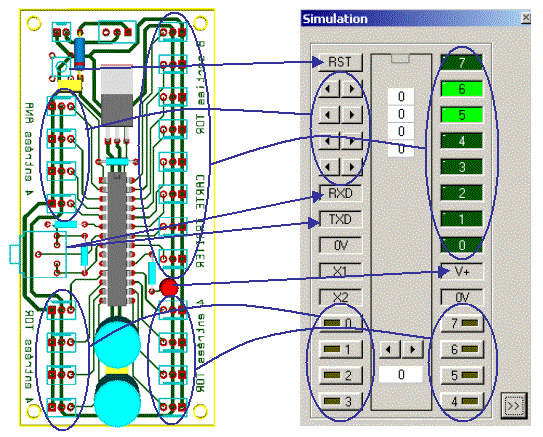
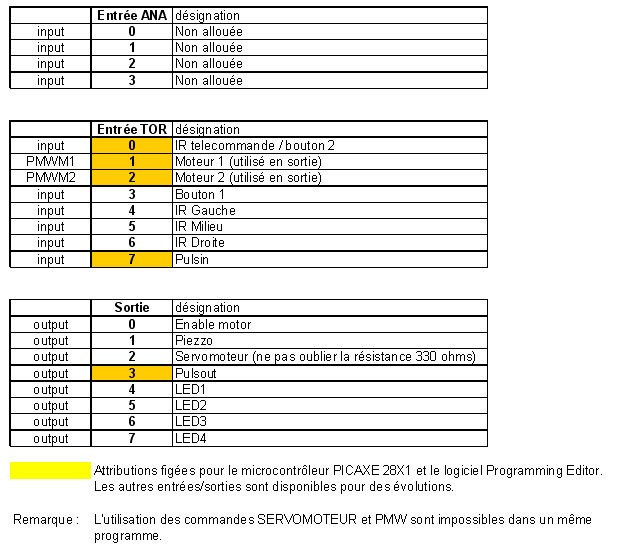
Pour que les fonctions pré-programmés dans ces deux logiciels soient accéssibles, certaines entrées/sorties du microcontrôleurs sont figées à une utilisation donnée.
Exemple pour notre LµDOBOT X1 :
Carte distribuer
La carte distribuer du robot est un double pont en H contruit sur la base d'un L298. Elle peut supporter 2A maximum en continu et une tension d’alimentation des moteurs maximum de 50V.
L'inversion du signal MLI en entrée du L298N est assuré par des portes logiques inverseuses (74HC00).


Le schéma électrique : distribuer-sch
Le typon : Typon distribuer
Carte acquérir ligne
La carte acquérir ligne du robot fonctionne sur la base d'une diode infrarouge de référence CQY89 et d'un phototransistor de référence PT331C.
Le réglage de la sensibilité des trois capteurs de ligne (seuil) se fait à l'aide d'un unique potentiomètre.
Les amplificateurs opérationnels (Ampli OP) sont montés en comparateur.


Le schéma électrique : Acquerir ligne-sch
Le typon : Typon acquerir ligne
Carte acquérir obstacle
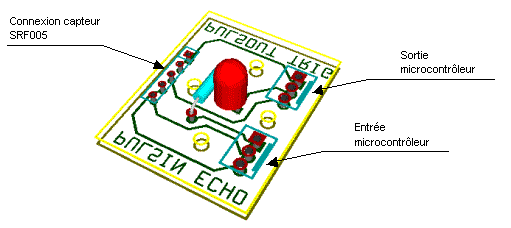
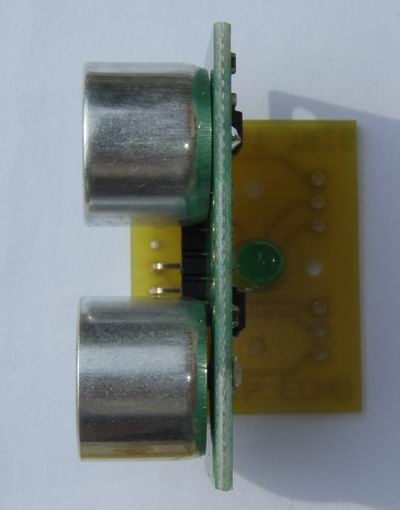
La carte acquérir obstacle du robot est le support d'un capteur à ultrason de type SRF005. Elle sera positionnée sur un servomoteur.
Le schéma électrique : acquerir obstacle-sch
Le typon : Typon acquerir obstacle
Carte acquérir ordres utilisateurs
La carte acquérir ordres utilisateurs du robot permet de d'acquérir les ordres de l'utilisateur via deux boutons poussoir mais également via une télécommande dont les fonctions de programmation sont directement implémenté dans Programming éditor ou dans Logicator.


Le schéma électrique : acquerir IR-sch
Le typon : Typon ordres utilisateur
Carte communiquer avec l'utilisateur
La carte communiquer avec l'utilisateur du robot permet de communiquer avec l'utilisateur via quatre diodes électro-luminescente indépendantes.


Le schéma électrique : communiquer-sch
Le typon : Typon communiquer
retour page précédente