Détail des cartes électroniques du robot
Toutes les cartes électroniques du robot ont été conçues et routées sous TCI, logiciel gratuit de routage non assisté.
Pour la réalisation de ces cartes je me suis fortement inspiré du manuel de ce robot : basic-bot
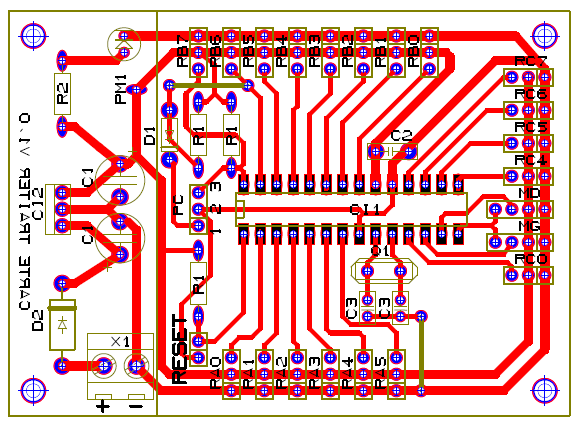
Carte traiter à base de microcontroleur PICBASIC P3B
La carte traiter du robot est le ''cerveau'' du robot. Elle est construite autour d'un
PICBASIC P3B et est programmable à l'aide d'un câble USB qui se connecte
sur un port 3 broches.
On y retrouve également un régulateur de tension 5 Volts, un 7805.
Le typon : traiter
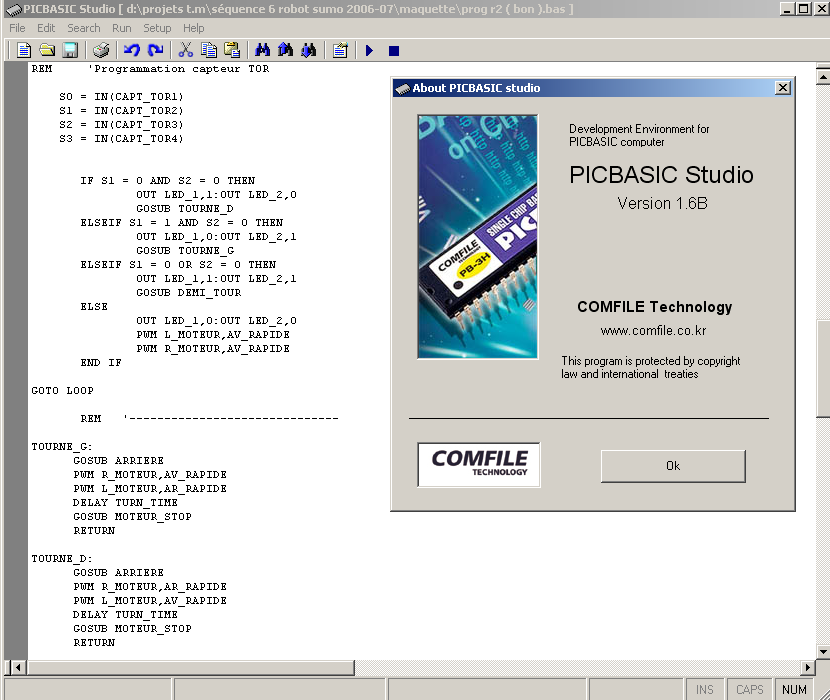
La programmation du robot se fait en basic propriétaire sous PicBasic Studio (licence gratuite).
Il existe une bonne documentation au format pdf sur l'interfaçage et le language de programmation du PICBASIC P3B : Documentation Picbasic 3B
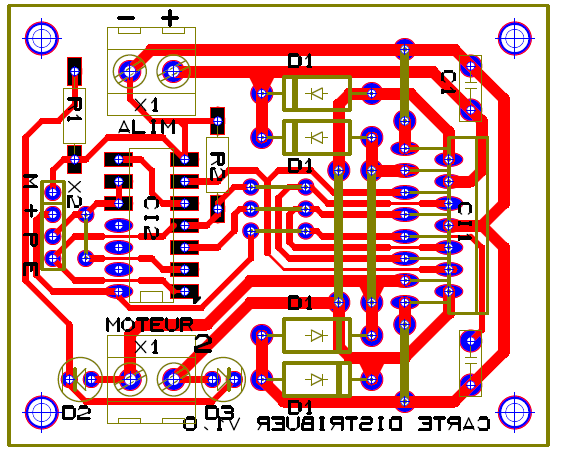
Carte distribuer
La carte distribuer du robot est un double pont en H contruit sur la base d'un L298N.
Elle peut supporter 2A maximum en continu et une tension d’alimentation des moteurs maximum de 50V.
Dans
notre cas les moteurs peuvent consommer jusqu'a 3.5A, dans ce cas il
faut ponter le double pont en H du L298 pour qu'il puisse supporter un
tel ampérage.
Il y a donc une carte distribuer par moteur.
L'inversion du signal MLI en entrée du L298N est assuré par des portes logiques inverseuses (74HC00).
Le typon : Distribuer
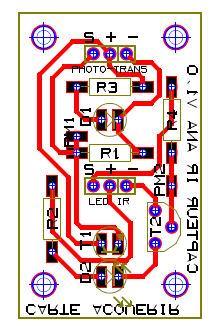
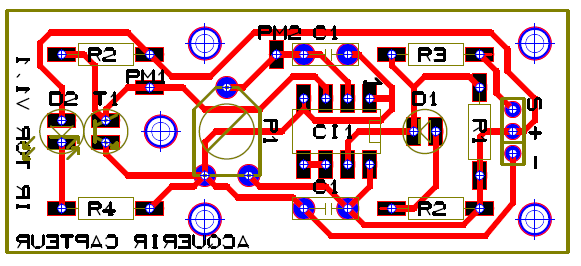
Carte capteur analogique
La carte capteur analogique du robot fonctionne sur la base d'une diode infrarouge de référence CQY89 et d'un phototransistor de référence PT331C.
Le typon : Capteur Analogique
Carte capteur TOR (tout ou rien)
La carte capteur TOR du robot fonctionne sur la base d'une diode infrarouge de référence CQY89 et d'un phototransistor de référence PT331C.
Le réglage de la sensibilité du capteur de ligne (seuil) se fait à l'aide d'un potentiomètre.
L'amplificateur opérationnel (Ampli OP) est monté en comparateur.
Le typon : Capteur TOR
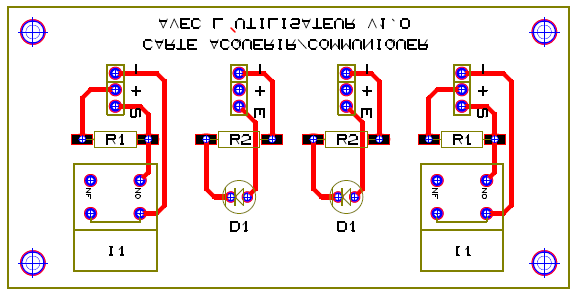
Carte acquérir et communiquer
La carte acquérir et communiquer du robot permet d'acquérir les ordres de l'utilisateur via deux boutons
poussoir et de communiquer avec lui via deux DEL.
Le typon : Acquerir Communiquer Utilisateur
retour page précédente